* DC Motor 정의
: 고정자로 영구자석을 사용하고, 회전자(전기자)로 코일을 사용하여 구성한 것으로,
전기자에 흐르는 전류의 방향을 전환함으로써 자력의 반발, 흡인력으로 회전력을 생성
시키는 모터이다.

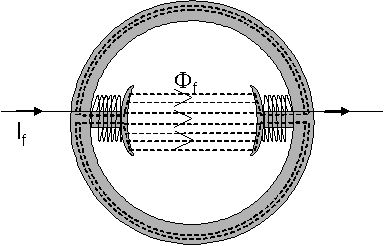
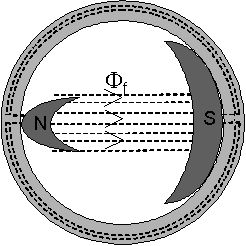
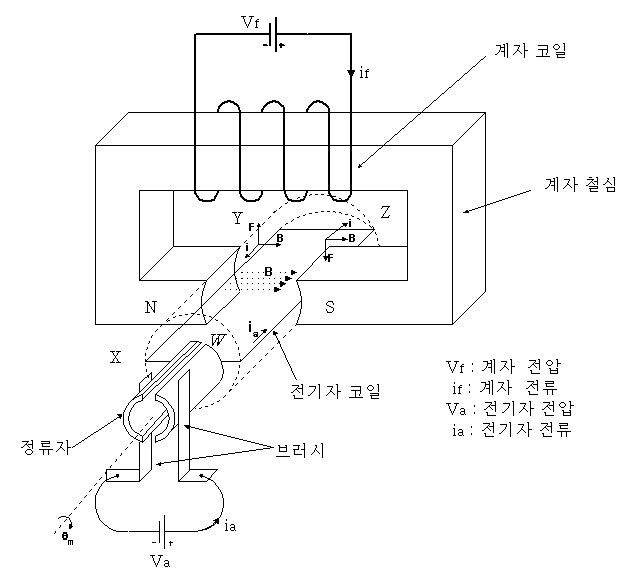
* DC Motor 원리
: 정류자를 통하여 그림과 같이 전류를 흘리게 되면 플레밍의 법칙에 의해 전기자 코일이 회전하게 된다.
* DC Motor 구동
전
동기는 기본적으로 고정된 고정자(stator)와 회전하는 회전자(rotor)를 구성하는 두 개의 코어와 공극으로 구성된 변압기라 할
수 있다. 1차권선과 2차 권선은 각각 고정자와 회전자에 권선이 이루어지며, 고정자와 회전자 권선에 흐르는 전류에 의해 형성된
자계의 방향이 일치되지 않으면 회전자를 기계적으로 끌어당기는 작용을 하게 된다.
DC
전동기의 고정자는 영구자석 또는 에너지를 공급하기 위한 권선이 직류전압에 의해 여자되는 방식을 사용하며, 후자의 경우 고정자
권선을 계자 권선(field winding)이라고 한다. 회전자 권선은 모터의 회전을 유지하기 위하여 맥동하는 형태의 직류전원에
의해 여자되며, 이러한 펄스 형태의 직류전원을 기계적인 정류자(commutator) 또는 브러시리스(brushless) 전동기와
같이 다이오드나 트랜지스터 소자를 이용한 전기적인 쵸퍼회로를 사용하여 전원을 공급하는 것이 가능하다.
* DC Motor 용어
회생 제동[regenerative braking, 역상제동(plugging)]
이
모드에 있을 때 직류전동기가 정방향으로 회전하는 동안, 회전방향을 멈추거나 바꾸기 위해 전기자 양단의 직류전원의 극성이 바뀌게
된다. 전동기는 발전기와 같이 동작한다. 전동기의 운동에너지는 전기적 에너지로 변환되어 전원으로 돌아가게 된다. 전기자와
계자전류의 극성은 반대이다.
발전 제동[dynamic braking]
발전 제동은 전동기를 정지시키기 위한 경우에 직류전원을 제거하고 전기자 권선 양단에 인가된 Rb를 연결하는 것을 말한다. 전동기의 운동에너지는 Rb에서 소모된다. 전기자와 계자전류의 극성은 반대이다.
4상한 운전[four-quadrant operation]
4
상한 운전은 정방향과 역방향의 양쪽 방향에서 회생 제동이 가능한 직류전동기의 운전을 일컫는다. 1상한과 3상한 운전에서 에너지는
직류전원으로부터 부하로 흐른다. 2상한과 4상한 운전은 전동기의 운동에너지가 직류전원으로 돌아가는 회생 제동을 나타낸다.
파형률[form factor]
파형률은 직류전동기에서 리플의 실효값과 전기자 전류의 평균값의 비로 정의된다.
전
기자 전류의 실효값은 직류전동기에서 전기자 전류의 리플량과 그에 따른 열손실을 포함한 전력손실을 나타낸다. 전기자 전류의 평균값은
전동기에 공급되는 직류전력과 그로 인한 기계적인 발생 토크를 나타낸다. 파형률은 순수한 직류 전기자 전류에서는 0이다. 파형률이
높은 값을 가진다는 것은 손실이 많다는 것을 나타내므로, 전동기의 온도가 높고 효율이 낮다는 것을 의미하며, 또한 전기자 전류의
피크값이 크다는 것을 나타낸다. 높은 피크전류는 정류자와 브러시에서 심한 아크를 발생시킬 것이다. 또한, 전기자 전류에서의 높은
피크전류와 리플은 발생 토크에서의 맥동을 의미하며, 이것은 바람직하지 않은 현상이다. 설계자는 항상 파형률의 최저 값을 목표로
삼아야 한다.
* DC Motor 발생토크와 변수와의 관계

*DC모터의 기본식
자계권선에 대해서는
계자전압 vf=Rf·if + Lf·dif/dt ... (1)
전기자 코일에 대한 등가회로에서
전기자전압 va=Ra·ia + La·die/dt + e ... (2)
역기전력 e에 대해서는
역기전력 e=Ke · if · ωm ... (3)
토크 t에 대해서는
토크 τ=Ke · if · ωm ... (4)
와 같은 4개의 관계식이 얻어진다.
이 관계식은 DC모터의 특성을 생각하는 데 기본이 되는 식이므로 DC모터의 기본식이라 부른다.
직류전원 인가 후 일정시간이 지나면 전압과 전류가 시간에 대해 일정하게 되므로
i → I’V → V’ωm Ωm로 쓸 수 있고 그 경우 di/dt -> 0가 되고 식 (1)~(4)는
다음과 같이 간단한 표현으로 바꿀 수 있다.
Vf=Rf·If ... (5)
Va=Ke·If·Ωm ... (6)
E=Ke·If·Ωm ... (7)
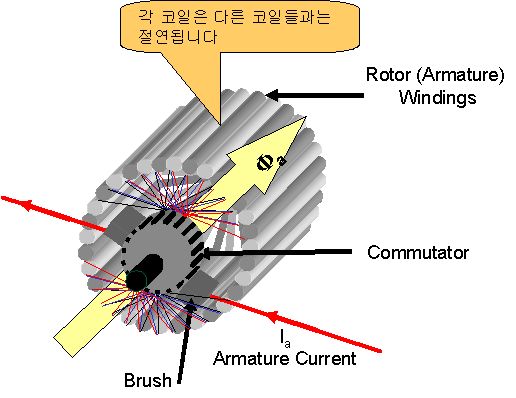
* DC Motor 구조(회전자)
* DC Motor 구조(고정자)
Series or Shunt Wound DC Motor Permanent Magnet DC Motor
일반적으로 DC 모터는 크게 다음과 같은 특징이 있다.
(1) 기동 토크가 크다
(2) 인가전압에 대하여 회전특성이 직선적으로 비례한다
(3) 입력전류에 대하여 출력 토크가 직선적으로 비례하며, 또한 출력 효율이 양호하다
(4) 가격이 저렴하다
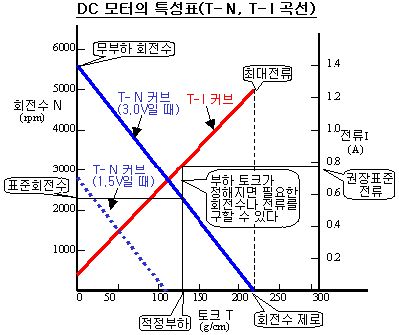
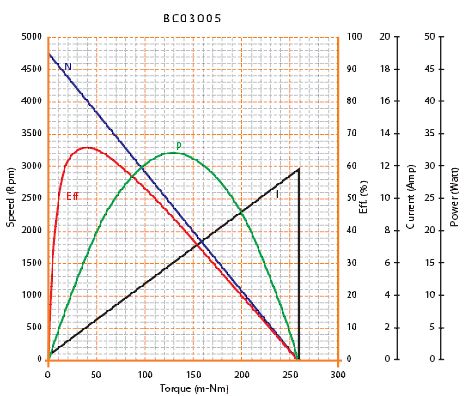
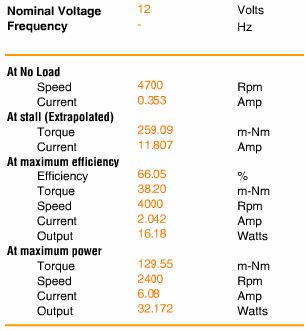
* DC Motor Specification
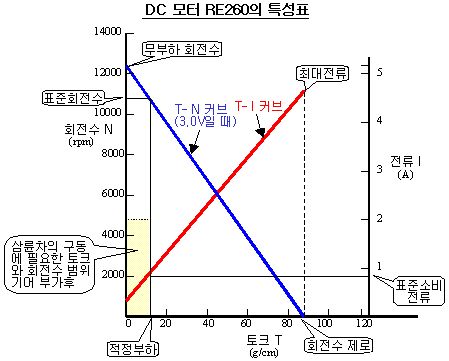
(1) T-I 특성(토크 대 전류)
흘린 전류에 대해 깨끗하게 직선적으로 토크가 비례한다. 즉, 큰 힘이 필요한 때는 전류를 많이 흘리면 되는 것이다.
(2) T-N 특성(토크 대 회전수(Speed))
토크에 대하여 회전수는 직선적으로 반비례한다.
이것에 의하면 무거운 것을 돌릴 때는 천천히 회전시키게 되고, 이것을 빨리 회전시키기 위해서는 전류를 많이 흘리게 된다.
그리고, 인가전압에 대해서도 비례하며, 그림과 같이 평행하게 이동시킨 그래프로 된다.
이들 2가지 특성은 서로 연동하고 있기 때문에 3가지 요소는 이 그래프에서 관계를 지을 수 있다.
즉, 이들 특성에서 알 수 있는 것은 회전수나 토크를 일정하게 하는 제어를 하려는 경우에는 여하튼 전류를 제어하면 양자를 제어할 수 있다는 것을 나타내고 있다.
이것은 제어회로나 제어방식을 생각할 때, 매우 단순한 회로나 방식으로 할 수 있는 것이다. 이것이 DC 모터는 제어하기 쉽다고 하는 이유이다.
일반적으로 DC 모터의 결점은 다음과 같습니다.
(1) 그 구조상 브러시(brush)와 정류자(commutator)에 의한 기계식 접점이 존재
(2) 이것에 의한 영향은 전류(轉流)시의 스파크(spark), 작동 소음, 수명 이라는 형태로 나타난다.
(3) 마이크로컴퓨터 제어를 하려는 경우는 "Noise"가 발생하게 된다.
※노이즈 대책을 위해서는 각 단자와 케이스 사이에 콘덴서(0.01μF∼0.1μF 정도)를 부착한다
이것으로 정류자에서 발생하는 spark 등을 흡수하여 노이즈를 억제할 수 있다.
* DC Motor의 선정 및 Reduction Gear
[Motor Specification example]
T-N-I Curve
모터 제조사의 카탈로그를 참조하여 모터를 선정하게 됩니다.
물론, 샘플을 요청해서 직접 test를 해볼수도 있으며, 요청하면 test결과를 같이 보내주는 경우도 있습니다.
실제 Motor를 제작하면 Spec.과 동일한 특성을 나타내기 어려운데, 제조사에서 제작후 test report를 같이 보내주죠.
(시스템에 최적인 모터 선정은 쉽지 않은 작업인것 같습니다. Torque (kgfcm), Speed (RPM), Speed (RPS), Current (Amp)
Efficiency (%), size, weight, 안전률 등 여러 가지를 고려해야겠죠)
다음에서 모터선정을 하는 예를 들어본다.
예를 들어, 필요한 기동 토크는 385(g·cm)라면, 안전율을 1.5배 정도로 보고, 600(g·cm) 이상으로 한다.
모터 카탈로그로에서 보면 기동 토크가 600(g·cm)를 넘는 것을 찾아보니 RS540 뿐이다. 그러나 이것으로는 모터 자체가 너무 크고 배터리나 모터의 중량을 가미하면 2kg의 전체 중량을 훨씬 넘어 버린다.
그러면 어떻게 하면 좋을까?
답은... Gear를 사용하는 것이다.
(물론 기어의 종류도 많고, 성격에 맞는 기어의 선택도 아주 중요하다. ‘스퍼기어’, ‘웜과 웜휠 기어’, '베벨기어' ... )
동륜축에 기어를 부착하여 감속시키는 방법이다.
그렇게 하면 모터의 토크를 기어에 비례하여 감속시킬 수 있다.
간단한 공작 실험을 한다면 모형점에서도 기어 세트를 구입할 수 있는데, 예를 들면
모터는 RE260이고, 기어 세트에서 기어비가 40:1이나 65:1인 경우, 40:1로 했을 때, RE260의 기동 토크는
50~90이므로 기어 후에는 2000부터 3600까지 할 수 있어, 필요한 600(g·cm)은 충분히 구동할 수 있다는 계산이다.
또, 등속 운전시에는 RE260의 적정 부하토크가 10∼15(g·cm)이므로 40배하며, 역시 400부터 600(g·cm)의 토크를 낼 수 있으므로 필요한 225×1.5배=338(g·cm)를 충분히 구동할 수 있다.
그러나, 가속기간의 최종 단계 무렵에는 모터의 적정 부하시의 토크로 구동하는 것이 되는
셈이므로, 600(g·cm)의 토크를 내기 위해서는 모터의 적정 부하시의 토크로 15g·cm 이상의 토크가 필요하기 때문에
1.5V로 구동하는 것은 사실 역부족이다.
따라서 모터에 가하는 전압은 3V로 하게 된다.
즉, 모터가 낼 수 있는 있는 토크는 속도가 높아지면 반비례하여 내려가는 점에 주의할 필요가 있다.
회전수는 충분한가?
적정 부하시의 RE260의 회전수는 5000∼10100이므로 이 40분의 1은 125∼252 회전/분이므로, 2회전/sec 즉 120회전/분을 충분히 커버할 수 있다.
이 관계를 그림으로 나타낸 것이 아랫 그림인데, 황색의 범위가 필요하게 되는 토크와 회전수의 범위로 되지만, 이것이 모터의 적정부가 동작의 범위내에 들어가 있으면 문제없이 구동할 수 있는 것이다.
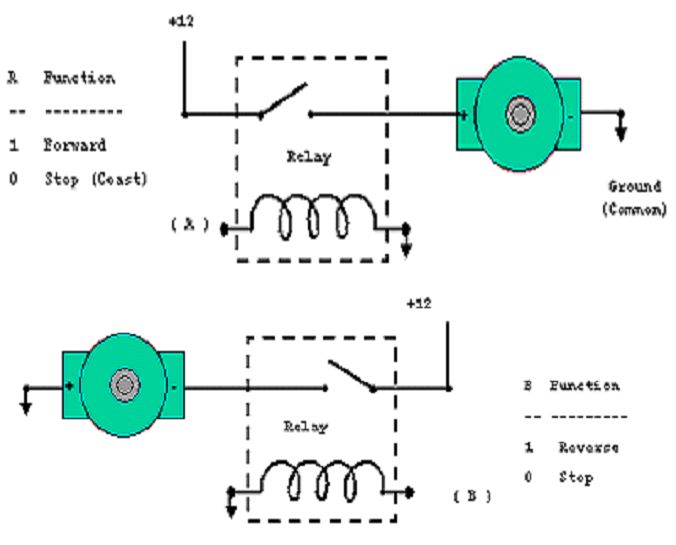
* DC Motor Driver(Mono Direction)
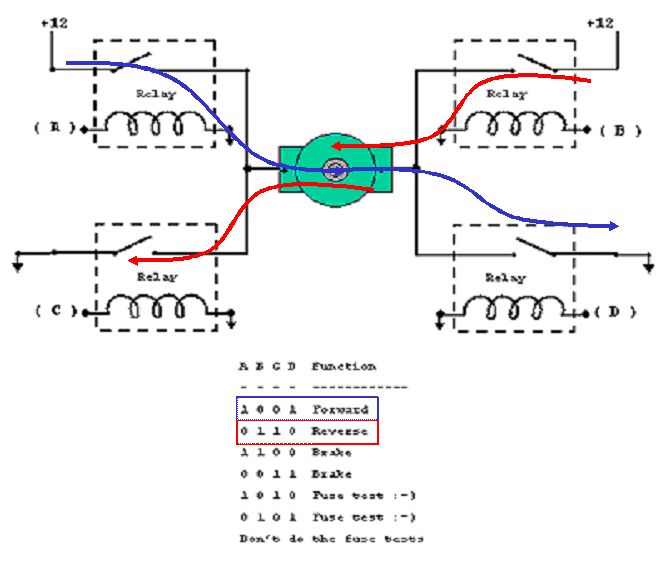
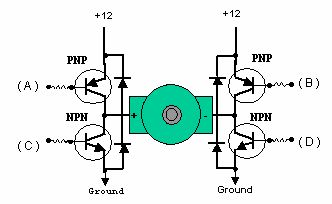
* DC Motor Driver(H-Bridge)
* DC Motor Driver(H-Bridge with IC's)
* DC Motor의 PWM 제어
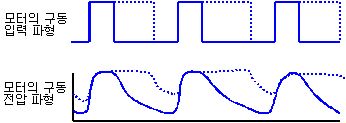
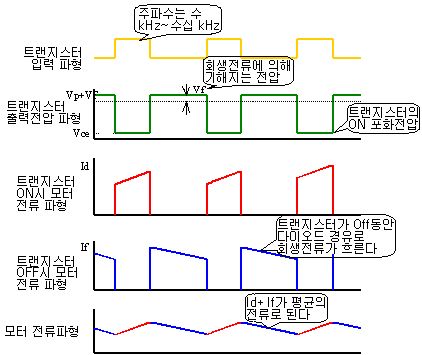
PWM(Pulse Width Modulation)은 DC Motor의 속도를 제어하기 위한 방법으로 Pulse의 Duty비를 조절하여 전압의 크기를 제어
하는 일반적으로 가장 많이 사용하는 방법이다.
[참고]
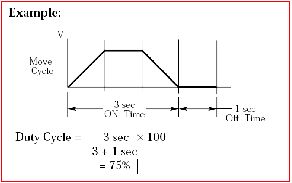
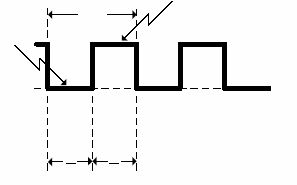
PWM(Pulse Width Modulation)은 TTL signal의 펄스폭(duty cycle)을 변형시키는(modulating) 과정이다.
이 때, Duty cycle은 TTL signal이 high일 때 이 signal의 주기의 지속시간이며, 이 값은 퍼센트로 나타낸다.
Duty 50% Duty 70, 80, 100%
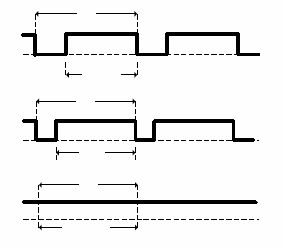
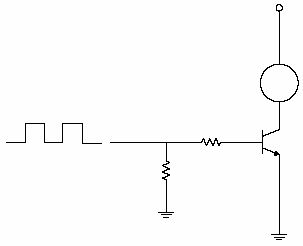
PWM에 의해 생성된 Duty cycle이 0% 이면, TR Q1은 off되고 이때 Motor로는 어떠한 Power도 전달되지 않는다.
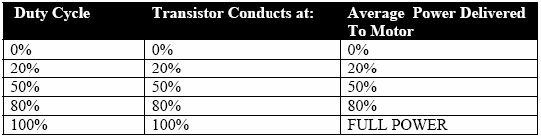 Duty Cycle, TR과 모터에 인가된 Power 관계
Duty Cycle, TR과 모터에 인가된 Power 관계
일반적으로 부하에 전달되는 power는 회로에 적용되는 duty cycle에 비례한다.
결과적으로 PWM은 LED의 밝기, Motor의 속도, 조명의 가변 등을 위해 사용 되어질 수 있다.
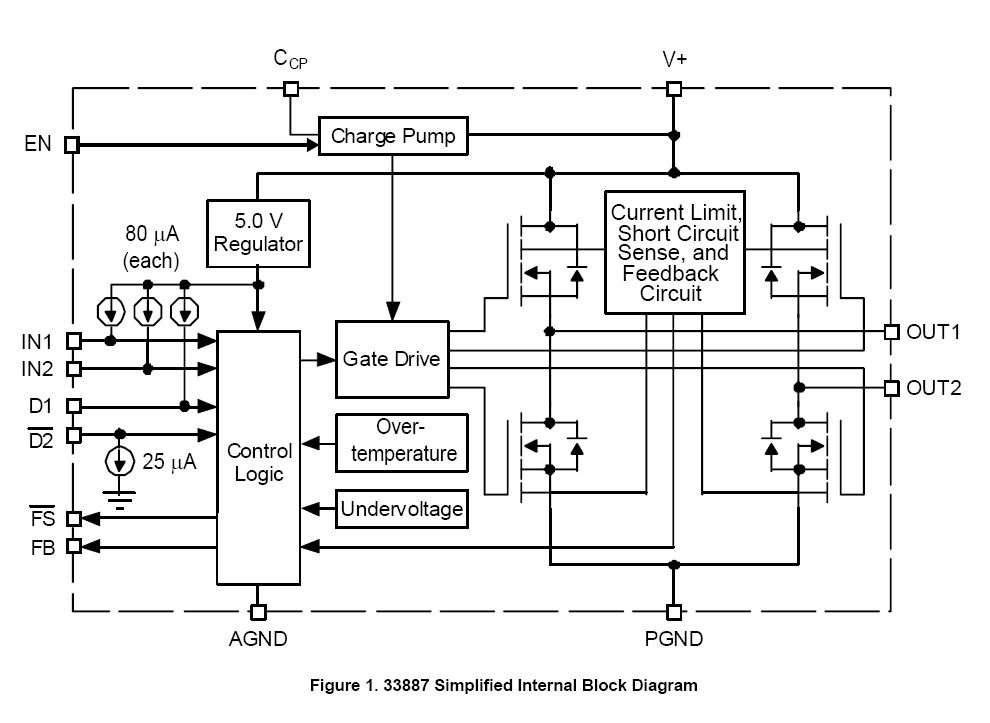
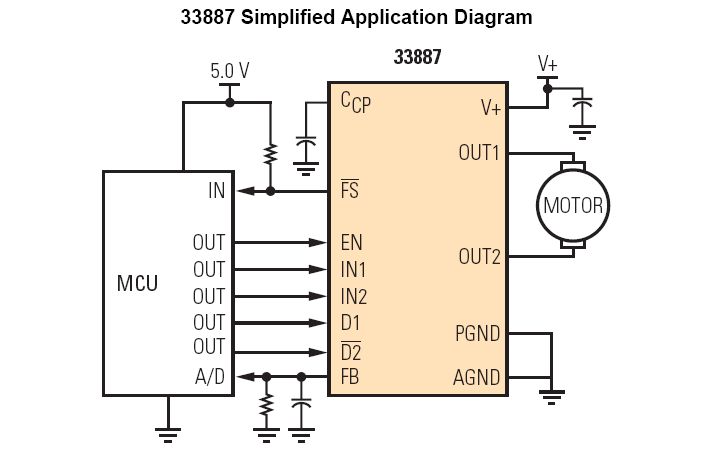
* DC Motor Driver 예시
아래는 실제 자동차용으로 적용되는 Motor 구동 driver에 대한 내용을 보여준다.
(Freescale社, mc33887)
mc33887은 closed-loop DC motor control을 위한 부하전류 피드백기능이 있는 H-Bridge 내장 IC이다.
Features
5.0 V to 40 V Continuous Operation
120 mΩ RDS(ON) H-Bridge MOSFETs
TTL/CMOS Compatible Inputs
PWM Frequencies up to 10 kHz
Active Current Limiting (Regulation)
Output Short Circuit Protection (Short to V+ or Short to GND)
Undervoltage Shutdown
Fault Status Reporting
Sleep Mode with Current Draw ≤50 µA (Inputs Floating or Set to Match Default Logic States)
Pb-Free Packaging Designated by Suffix Codes VW and PNB.